
News
Cap'n Proto v0.4: Time Traveling RPC
Well, Hofstadter kicked in and this release took way too long. But, after three long months, I’m happy to announce:
Time-Traveling RPC (Promise Pipelining)
v0.4 finally introduces the long-promised RPC system. Traditionally, RPC is plagued by the fact that networks have latency, and pretending that latency doesn’t exist by hiding it behind what looks like a normal function call only makes the problem worse. Cap’n Proto has a simple solution to this problem: send call results back in time, so they arrive at the client at the point in time when the call was originally made!
Curious how Cap’n Proto bypasses the laws of physics? Check out the docs!
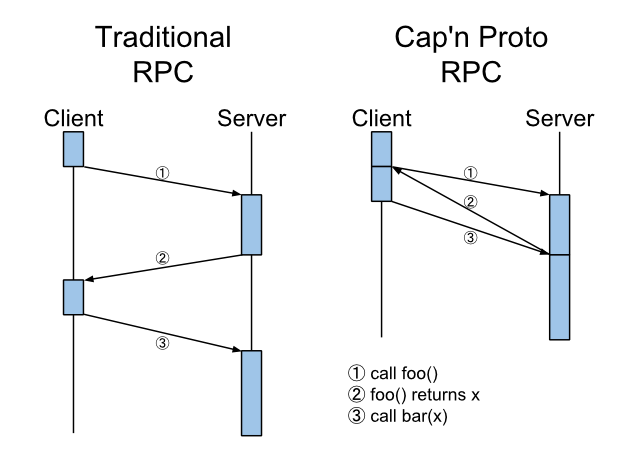
UPDATE: There has been some confusion about what I’m claiming. I am NOT saying that using promises alone (i.e. being asynchronous) constitutes “time travel”. Cap’n Proto implements a technique called Promise Pipelining which allows a new request to be formed based on the content of a previous result (in part or in whole) before that previous result is returned. Notice in the diagram that the result of foo() is being passed to bar(). Please see the docs or check out the calculator example for more.
Promises in C++
UPDATE: More confusion. This section is not about pipelining (“time travel”). This section is just talking about implementing a promise API in C++. Pipelining is another feature on top of that. Please see the RPC page if you want to know more about pipelining.
If you do a lot of serious JavaScript programming, you’ve probably heard of Promises/A+ and similar proposals. Cap’n Proto RPC introduces a similar construct in C++. In fact, the API is nearly identical, and its semantics are nearly identical. Compare with Domenic Denicola’s JavaScript example:
// C++ version of Domenic's JavaScript promises example.
getTweetsFor("domenic") // returns a promise
.then([](vector<Tweet> tweets) {
auto shortUrls = parseTweetsForUrls(tweets);
auto mostRecentShortUrl = shortUrls[0];
// expandUrlUsingTwitterApi returns a promise
return expandUrlUsingTwitterApi(mostRecentShortUrl);
})
.then(httpGet) // promise-returning function
.then(
[](string responseBody) {
cout << "Most recent link text:" << responseBody << endl;
},
[](kj::Exception&& error) {
cerr << "Error with the twitterverse:" << error << endl;
}
);This is C++, but it is no more lines – nor otherwise more complex – than the equivalent JavaScript. We’re doing several I/O operations, we’re doing them asynchronously, and we don’t have a huge unreadable mess of callback functions. Promises are based on event loop concurrency, which means you can perform concurrent operations with shared state without worrying about mutex locking – i.e., the JavaScript model. (Of course, if you really want threads, you can run multiple event loops in multiple threads and make inter-thread RPC calls between them.)
Python too
Jason has been diligently keeping his Python bindings up to date, so you can already use RPC there as well. The Python interactive interpreter makes a great debugging tool for calling C++ servers.
Up Next
Cap’n Proto is far from done, but working on it in a bubble will not produce ideal results. Starting after the holidays, I will be refocusing some of my time into an adjacent project which will be a heavy user of Cap’n Proto. I hope this experience will help me discover first hand the pain points in the current interface and keep development going in the right direction.
This does, however, mean that core Cap’n Proto development will slow somewhat (unless contributors pick up the slack! ;) ). I am extremely excited about this next project, though, and I think you will be too. Stay tuned!